3. More Statistics
a. Propagating Error
We saw that Brute Force doesn't work when unknowns are directly connected with measurements. In the Direct Minimization method, connected unknowns appear in the same partial derivatives. Although the standard deviation of unit weight, So, for overall adjustment can be computed in both methods, neither allows easy determination of the expected quality of their individually adjusted values.
The Matrix method allows So to be propagated into the adjusted values with the covariance matrix, [Q] . It is used to compute expected standard errors of adjusted unknowns or adjusted observations. The corresponding unknowns for the [Q] matrix in Figure D-1 are u1, u2, u3, ... un.
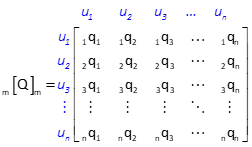 |
| Figure D-1 Covariance Matrix |
b. Standard Errors of Adjusted Values
Each covariance matrix diagonal element is unique to one of the unknown quantities and is used to compute its expected error, Equation D-3.
| Equation D-3 |
c. Standard Errors of Adjusted Observations
An adjusted observation is computed by adding its residual to the original observation, Equation D-4.
| Equation D-4 | |
|
i: observation number |
|
Uncertainties of the adjusted observations are related by the observation coefficients, covariance matrix, and So. The cofactor matrix, [Σ], is a product of the [C], [Q], and [CT] matrices, Equation D-5.
| Equation D-5 |
The size of the cofactor matrix is m x m, Figure D-2, so it can be quite large if there are many observations.
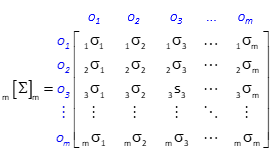 |
| Figure D-2 Cofactor Matrix |
The standard error of an observation is computed with Equation D-5.
| Equation D-5 | |
|
iσi : Diagonal element of [Σ] for observation i |
|
Because only a diagonal element is needed, the computations can be reduced somewhat. Each row of the [C] matrix corresponds to a particular observation. Because [CT] is the transpose of [C], each of its columns correspond to the same observations, Figure D-3.
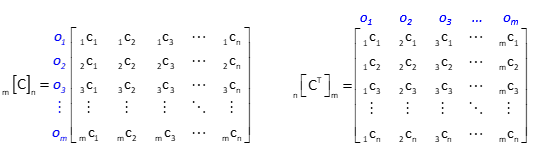 |
| Figure D-3 [C] and [CT] Matrices |
An observation's [Σ] matrix diagonal element can be computed using its [C] row and [CT] column with the [Q] matrix, Equation D-6.
| Equation D-6 | |
|
i: observation number |
|
Equation D-7 is Equations D-5 and D-6 combined.
| Equation D-7 |