H. More Horizontal Examples
1. Distance Intersection
Distance intersection, also known as Trilateration, is used to determine the position of an unknown point from two or more control points. Two control points with a distance from each intersect at two possible locations. Adding a third control point and distance eliminates one of the intersections. The presence of random errors, however, means the three distances will not intersect perfectly.
Figure H-1 is shows three control points with distances that intersect at point P. Use a least squares adjustment to determine the best coordinates of point P, its uncertainty, and error ellipse.
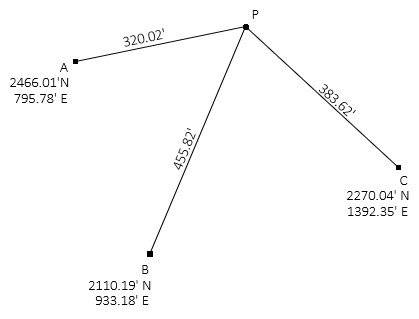 |
| Figure H-1 Distance Intersections |
Initial coordinate approximations for point P
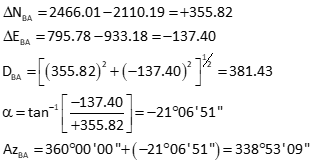
Distance and azimuth of line BA:
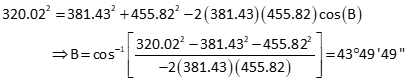
Law of Cosines to solve angle at B from A to P
Compute azimuth from B to P

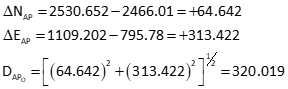
Forward computation from B to P

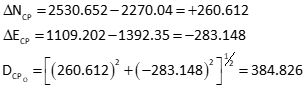
Calculate initial distances using point P's initial approximate coordinates
Because point B was used to compute point C, the computed distance is the measured distance.

Perform inverse computation to obtain distances from points A and C
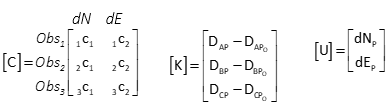
Matrix structures
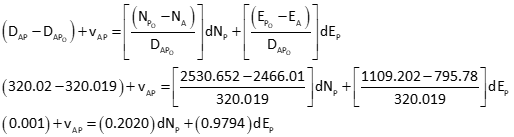
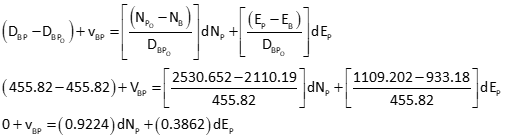
Set up the observation equations
Dist AP
Dist BP
Dist CP

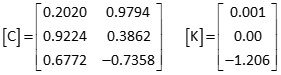
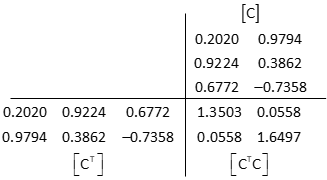
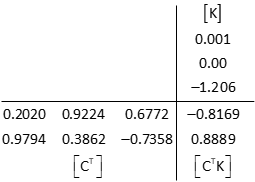
Set up matrices
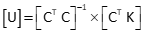
Solve the matrix algorithm iteratively
First iteration
Invert the [CTC] matrix using Determinant Method

Compute coordinate updates
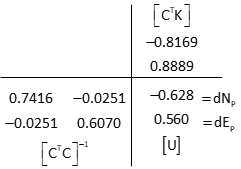
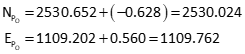
Update point P's coordinates
Second iteration
Update [C] and [K] matrices using the observation equations and new coordinates of point P.
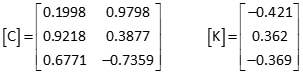
Recompute updates

Solution converged.
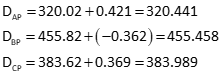
Adjusted distances
Compute distance residuals from

Since the last updates were zero, [C x U] is a column matrix with all elements equal to zero. Therefore:

Adjusted distances
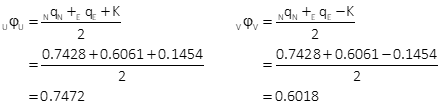
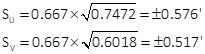
Position uncertainties
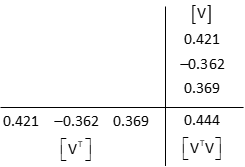
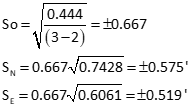
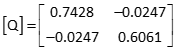
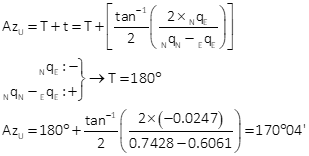
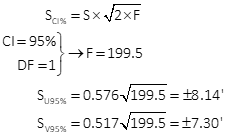
Compute error ellipse
The error ellipses in Figure H-2 are magnified 25 times since they would not be visible at the drawing scale.
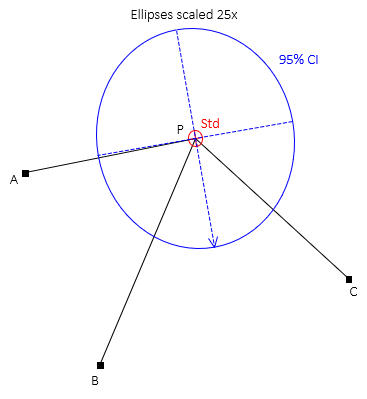 |
| Figure H-2 Standard and 95% CI Error Ellipses |
Adjustment Summary
| NP = 2530.024' ±0.574' | EP = 1109.762' ±0.519' | |
| Error Ellipse | ||
| AzU = 170°04' | ||
| SU = ±0.576' | SV = ±0.517' | |
| SU 95% = ±8.14' | SV 95% = ±7.30' | |